
Detalle del producto
nombre del producto: apilador tipo contrapeso agv
la posición de la máquina elevadora en el entorno se obtiene a través de escaneo láser y algoritmos, y la ruta es planificada por el software responsable de la planificación de rutas para lograr un posicionamiento preciso y una marcha estable; el reflector final ayuda al posicionamiento para lograr una recogida y colocación precisas de las carretillas elevadoras en la estación . con esta avanzada tecnología de navegación láser híbrida , está completamente realizada para automatizar la conducción y el funcionamiento de las carretillas elevadoras .
Descripción del Producto:
1. navegación láser, alta precisión de posicionamiento, incluso en entornos sin luz, la carretilla elevadora también puede ubicar con precisión;
2. con carga pesada y carga nominal de hasta 3000 kg, es adecuado para fábricas y talleres con área de sitio limitada;
3. la carrocería del vehículo y el sistema de navegación se pueden personalizar para cumplir con varios escenarios de uso.
ventaja del producto:
➤ tecnología de navegación láser híbrida
adopción de la tecnología de navegación láser híbrida de reflector final, equipada con carretilla elevadora de derechos de propiedad independiente;
controlador de movimiento para lograr un posicionamiento final de ± 10 mm. mejorar de manera integral la eficiencia y ahorrar costos.
➤ funcionamiento totalmente automático
potente algoritmo y soporte de hardware, reemplaza completamente a la carretilla elevadora manual, eficiente y seguro.
➤ rendimiento de alto costo
la tecnología de navegación y el controlador se desarrollan y fabrican de forma independiente,, lo que es más rentable que las marcas extranjeras.
➤ selección diversificada de carrocerías de carretillas elevadoras
varias especificaciones de carrocerías de montacargas están disponibles para cumplir con varios escenarios de uso.
parámetros:
| cdd*bj01-30 | |||
| parametros basicos | dimensión (incluida la horquilla) | mm | l3295*w1244*h2250 |
| peso propio | kg | / | |
| modo de navegación | navegación láser | ||
| modo de control | sistema de control de movimiento inteligente efork | ||
| altura de elevación | mm | 3000 | |
| capacidad de carga nominal | kg | 1000~3000 | |
| centro de carga | mm | 500 | |
| actuación | velocidad de carrera | m/min | 50 |
| Temperatura de funcionamiento | ℃ | -10 ℃-40 ℃ | |
| precisión de orientación | mm | ±10 mm | |
| precisión de parada | mm | ±20 mm (Se necesita un posicionamiento secundario para una mayor precisión) | |
| dirección de viaje | bidireccional | ||
| velocidad de elevación (cargado/descargado) | mm/s | ||
| velocidad de descenso (cargado/descargado) | mm/s | ||
| radio de giro mínimo (excluyendo ast) | mm | 2100 | |
| canal de apilamiento (horquilla 1200 * 1000) | mm | 3850 (con ast) | |
| rendimiento de la batería de litio | tensión nominal | V | 48 |
| capacidad eléctrica | Ah | 300 (personalizable) | |
| número de ciclos de descarga de carga | 1500 | ||
| tiempo de resistencia | h | funciona durante unas 8 horas | |
| tiempo de carga | h | 1-2 | |
| Medida de seguridad | evitación de obstáculos con láser | sí | |
| Inspección de paletas en su lugar | sí | ||
| inspección del sensor de infrarrojos de dientes de horquilla | sí | ||
| botón de parada de emergencia | sí | ||
| alarma de luz y sonido | sí | ||
| prevención de colisiones mecánicas | sí | ||
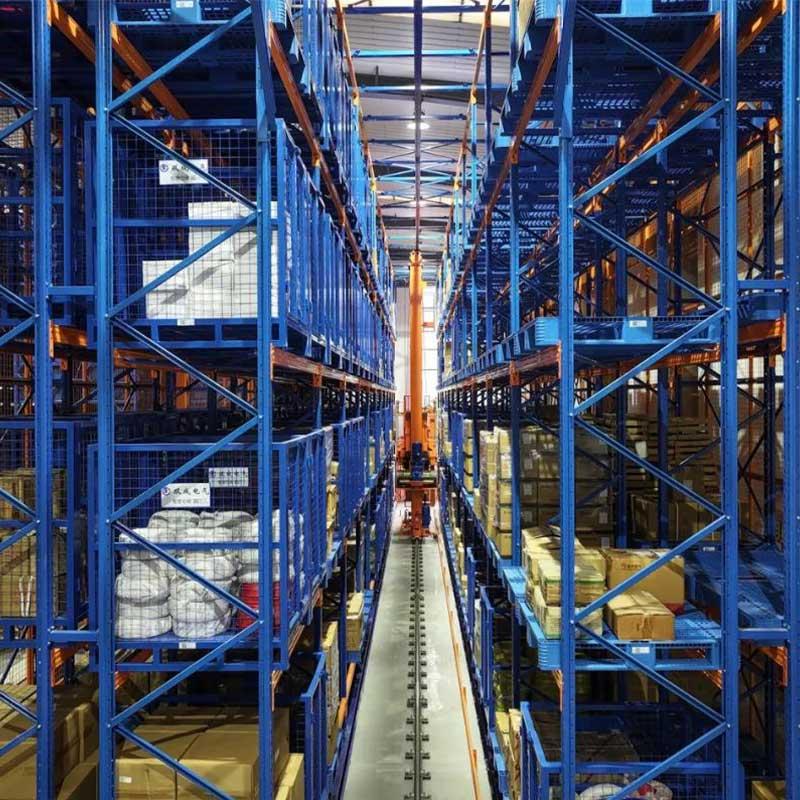
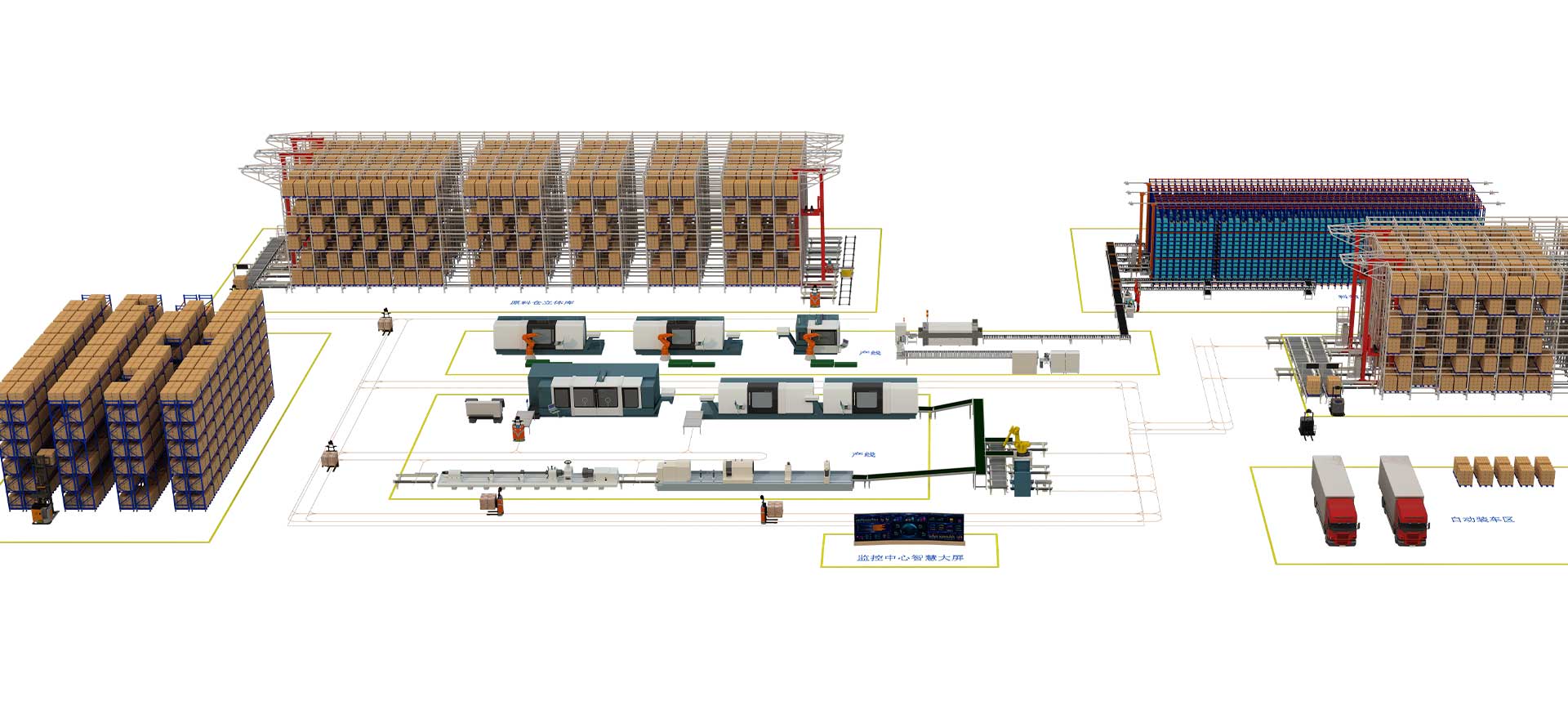
imágenes:







 Red IPv6 admitida
Red IPv6 admitida